Installation
Prerequisites
- Ensure you have run
make installin the directory of your libpynq installation at least once. - Get yourself a
doom.wadfile or two. I had trouble running the shareware version, so feel free to try different files if one doesn’t work.
Steps
- Download and extract the repository into the home directory of your PYNQ.
- Move your
doom.wadfile into theDOOM_libpynqdirectory. - Enter
DOOM_libpynqand openparams.mk. - Override the value of
LIB_PYNQaccording to your setup.- The preset value assumes that both your main libpynq folder and your
DOOM_libpynqare in your home directory. If that is the case and the libpynq versions match, you may already be good to go.
- The preset value assumes that both your main libpynq folder and your
- Run
make install - Run
make run
Controls
| SW1 | SW0 | BTN3 | BTN2 | BTN1 | BTN0 |
|---|---|---|---|---|---|
| Enter (Use to navigate menus) | Use (Open doors and use switches) | Left | Right | Up | Down |
Troubleshooting
- I get errors
- Maybe try different .wad files
- I get horrible performance
- After I boot up my PYNQ, VSCode eats up 100% of the CPU time indexing files. If you’re experiencing the same, try waiting for it to finish.
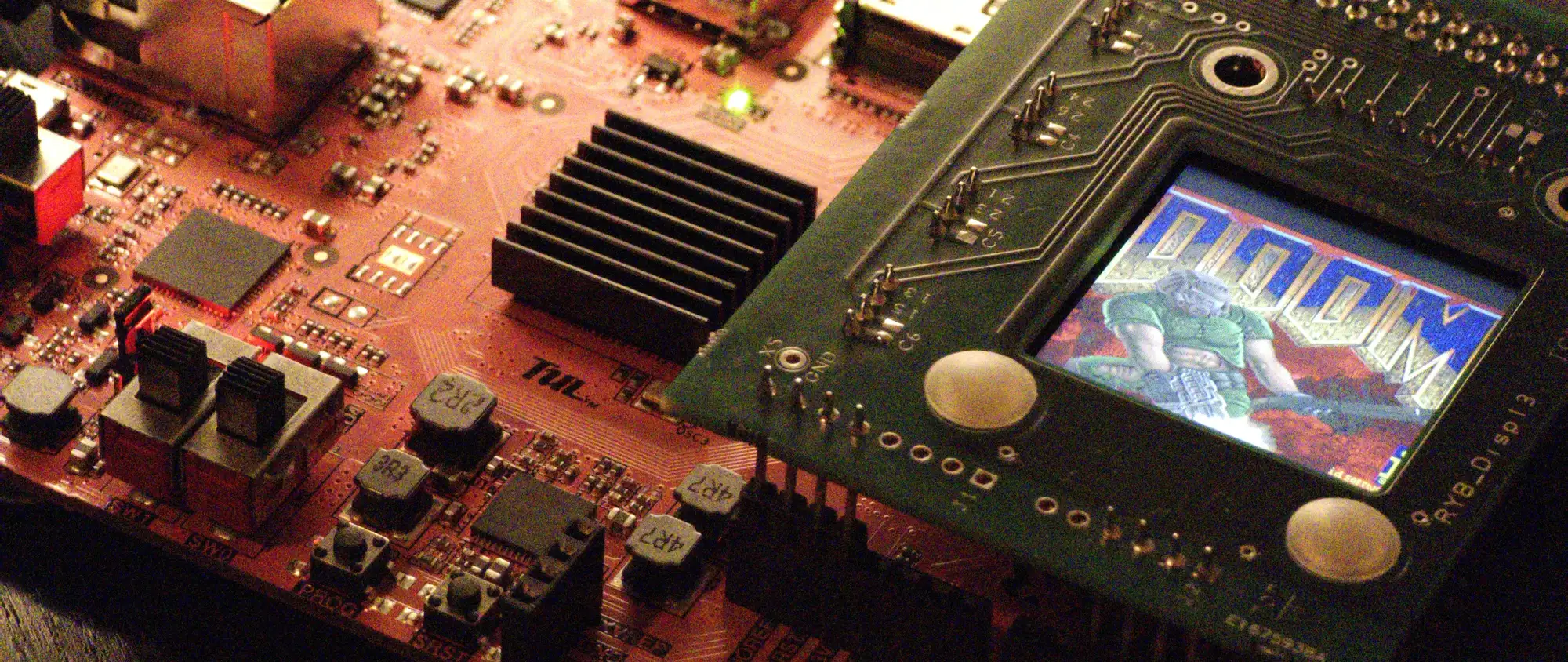
I did not expect porting DOOM was this easy
Like yeah, the legend says that you can run DOOM on a toaster or on a microwave, but I always thought that this was at least a mild exaggeration. You know… It can’t be that…
It’s that easy.
For context, before attempting this, I thought it would take me at least a couple of days, maybe even a week or two, but no. This genuinely took half a day and most of that time was wasted just wrestling with makefiles. Considering that I’m a total C newbie, it’s really incredible the amount of work the people behind doomgeneric did to make the dream of running DOOM literally anywhere a reality.
Seriously, I cannot stress this enough – this entire porting process required me to write exactly SIX functions of which only TWO took more than 5 minutes. It’s ludicrous.
My point is that it’s so easy it’s a wonder it hasn’t been ported to more platforms. So go ahead, do it. Be the change you want to see in the world. Port DOOM to your dishwasher and share it with the world.
Performance and libpynq
The first image
The very first thing I tried to do after getting my PYNQ board was to display images on the cute little display. That was literally my first time touching C, but it was surprisingly easy and with the help of stb_image I got an image on the display within that very same day.
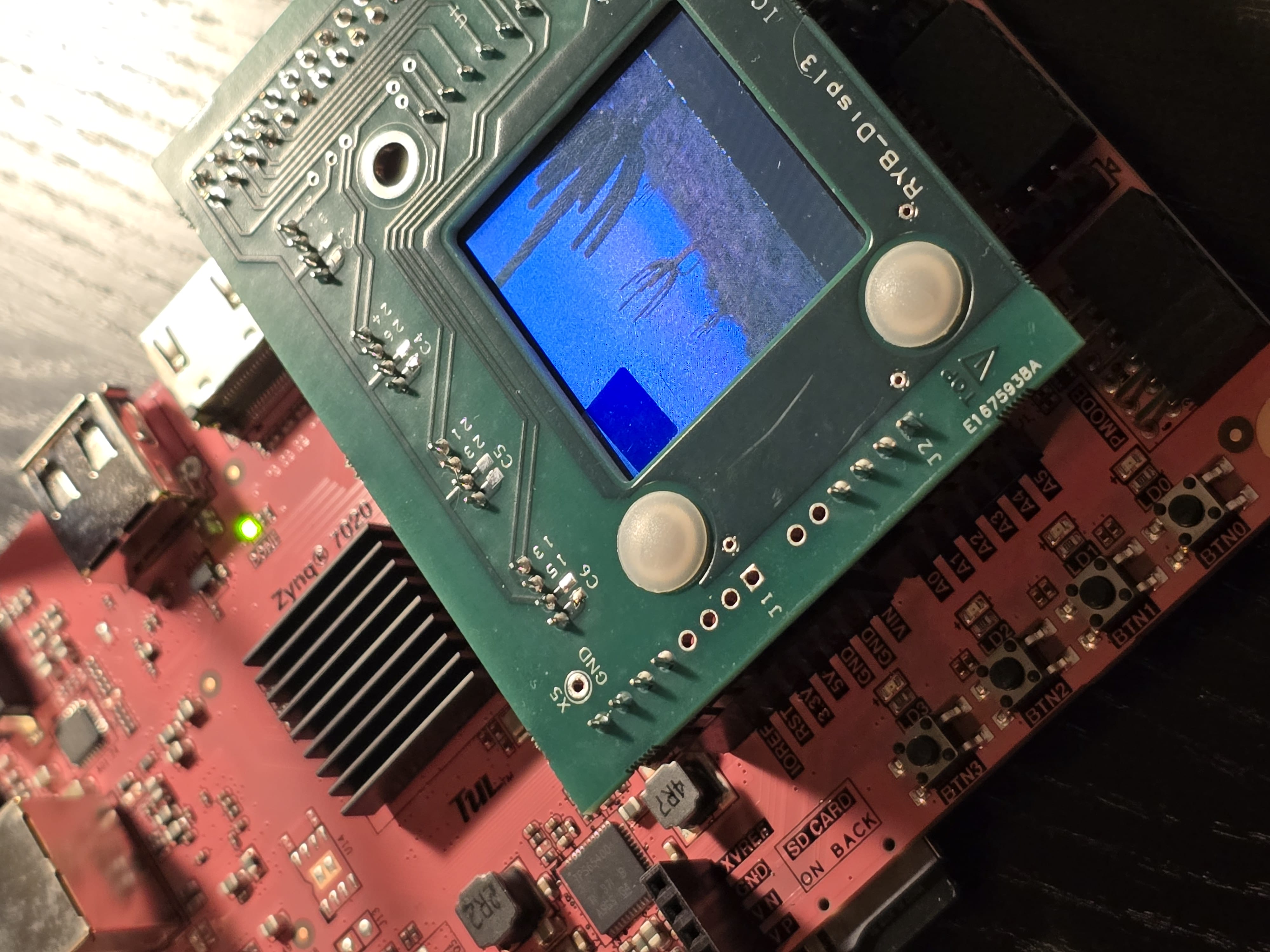
Having experienced great success, I set myself a slightly bigger challenge of playing Shrek on this bad boy. Obviously, I had no intention of working with video codecs and the like, so the second-best option was a gif. Luckily, the stb_image library already had some functions for dealing with gifs too, so the next day, in all my excitement, I plugged in the wires and…
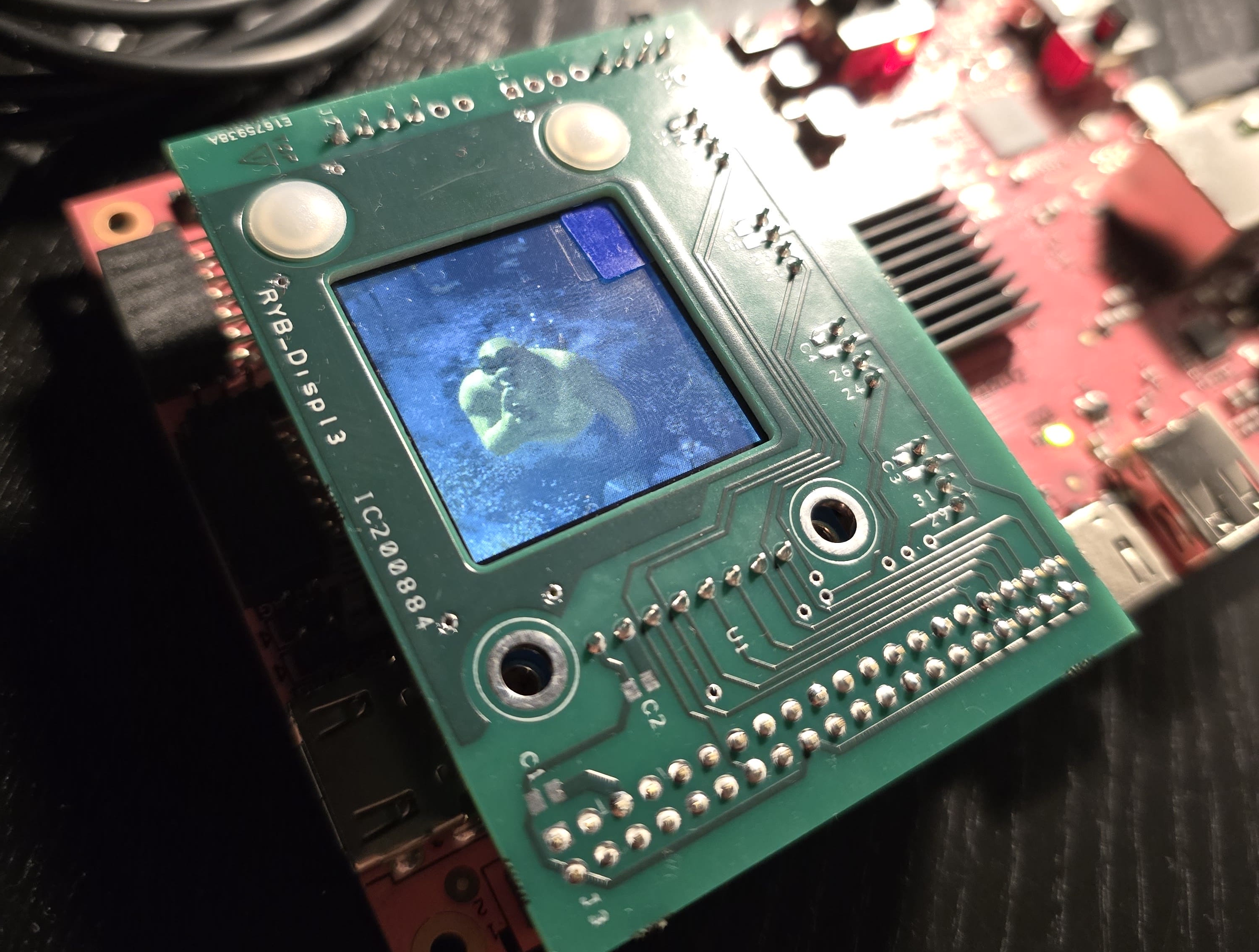
There was a major problem. The performance wasn’t great. By that I mean it ran at a whopping 0.25 FPS. Certainly not real-time and about 100 times less than what would be required to run DOOM without having the ambulance on the line.
Being unsure of what to do, I cleaned up my spaghetti code and while that did manage to improve the performance to maybe about 0.33 FPS, things were not looking good. My code was pretty much perfect, so in a desperate search for answers I dove into the libpynq source code.
Expedition into the source
And oh my!
Here’s some highlights (comments mine):
bool spi_master_write_command(display_t *display, uint8_t cmd) {
gpio_set_level(display->_dc, spi_to_gpio(SPI_Command_Mode));
spi0[0x68 / 4] = cmd;
while (((spi0[0x64 / 4]) & 4) == 0) { //Sure, let's wait. We got time.
}
usleep(1); //Imagine setting a 1 usec delay for EACH PIXEL DRAWN
return true;
}
bool spi_master_write_data_byte(display_t *display, uint8_t data) {
gpio_set_level(display->_dc, spi_to_gpio(SPI_Data_Mode));
spi0[0x68 / 4] = data;
while (((spi0[0x64 / 4]) & 4) == 0) {
//Guys, relax it's not like we've got a frame to render
}
return true;
}
bool spi_master_write_color(display_t *display, uint16_t color, uint16_t size) {
gpio_set_level(display->_dc, spi_to_gpio(SPI_Data_Mode));
for (int i = 0; i < size; i++) {
while (((spi0[0x64 / 4]) & 8) == 8) { //Yo, Bobby, wanna grab some coffee?
}
spi0[0x68 / 4] = (color >> 8) & 0xFF;
while (((spi0[0x64 / 4]) & 8) == 8) { //Sure man, we've been in this loop for hours
}
spi0[0x68 / 4] = (color)&0xFF;
}
while (((spi0[0x64 / 4]) & 4) == 0) { // One more for good measure
}
return -1;
}
And there’s more.
Admittedly, there’s a reason to do (some of) this. You wait to ensure that the data you’ve written has actually been passed through and received or whatever, but, man, that’s slow. I want real-time rendering, I don’t care if there’s a pixel missing or something like that. I want pixels to move and I want them do to that fast.
In the end, during my excursion to the source files I:
- Commented out all that shit (It’s fine, to my eye the picture’s perfect even without the guardrails).
- Discovered a function to draw pixels in batches and adapted it to my codebase.
In the end that was enough to jump from 0.25 FPS to about 26 FPS. It’s not often we get a 100x performance improvement by commenting out some lines, but we take those.
Most importantly, Shrek was happy.
Why stop at 26 FPS?
Uhhh it’s complicated.
At first I thought that 26 FPS was the limit. I looked around the library source and found out that the largest bottleneck was the loop sending the pixel data to the display, the speed of which was only limited by the hardware itself. That left me with 2 routes for further optimization:
- Send less data
- Unfortunately not possible as according to my SPI display’s datasheet it requires 16-bit color data (meaning two 8-bit writes)
- Send data faster
- That seems to actually be possible with QSPI or by using more IO pins for parallel data transfer, however from what I’ve gleaned that’s much above my skill level and there’s little motivation to do that when 26 FPS is fairly playable.
As well as that, I think I saw a project using FPGA to accelerate DOOM, so if you want to boost the FPS into the hundreds, the sky is the limit.